

The Electric MotorTurning electric power into motion
|
 |
|
|
1.) History and Inventors:1834
- Thomas Davenport
of Vermont developed the first real electric motor ('real' meaning
powerful enough to do a task) although Joseph
Henry and Michael
Faraday created early motion devices using electromagnetic fields.
The early "motors" created spinning disks or levers that
rocked back and forth. These devices could not do any work for humankind
but were important for leading the way to better motors in the future.
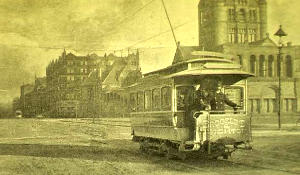
Davenport's various motors were
able to run a model trolley on a circular track and other tasks.
The trolley later turned out to be the first important application
of electric power (it was not the light bulb). Rudimentary
full sized electric trolleys
were finally built 30 years after Davenport's death in the 1850s.
It wasn't until 1873 that the electric motor finally achieved commericial success. Since the 1830s thousands of pioneering engineers have improved motors and created many variations. See other pages for more detail on the electric motor's vast history. |

After weak electric motors were developed by Faraday and Henry, another early pioneer named Hippolyte Pixii figured out that by running the motor backwards he could create pulses of electricity. By the 1860s powerful generators were being developed. The electrical industry could not begin until generators were developed because batteries were not an economical way to power society's needs. Read about generators and dynamos here >
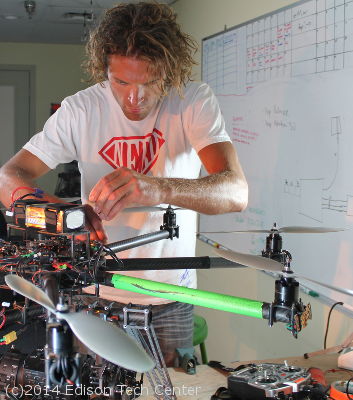
2.) How Motors WorkElectric motors can be powered by alternating (AC) current or direct current (DC). DC motors were developed first and have certain advantages and disadvantages. Each type of motor works differently but they all use the power of the electromagnetic field. We will talk about the very basic principals of electromagnetic fields in motors before you can move on to the different types of motors. AC electric motors use a secondary and primary winding (magnet), the primary is attached to AC grid power (or directly to a generator) and is energized. The secondary receives energy from the primary without directly touching it. This is done using the complex phenomena known as induction. Right: an engineer works on custom modifications to an octocopter drone. Eight tiny DC motors create enough power to lift pounds of payload. Newer motor designs like this use rare earth metals in the stator to create stronger magnetic fields in smaller, lighter packages. |
 |
 |
 |
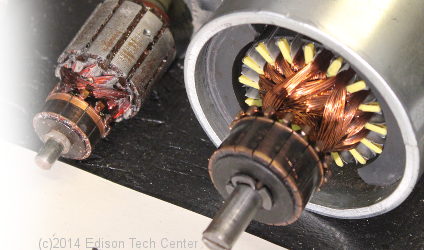
| Above: a universal motor typically found in most power tools. It has a heavy dense rotor. | Above: the induction motor may have a "squirrel cage" or hollow rotating coil or a heavy armature. |
2.a) Parts of an electric motor:
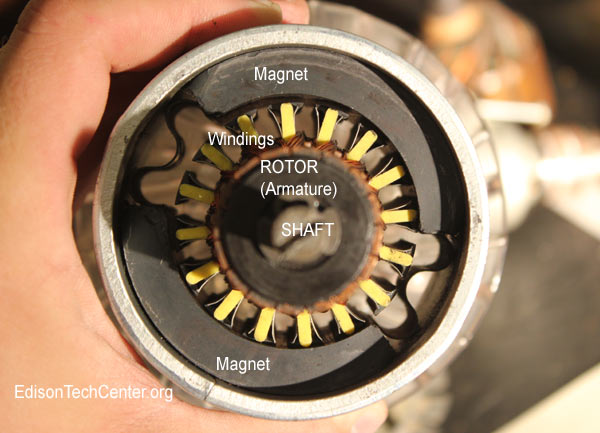
There are many kinds of electric motors but in general they have some similar parts. Each motor has a stator, which may be a permanent magnet (as shown in the 'universal motor' above) or wound insulted wires (an electromagnet like in the photo above-right). The rotor sits the middle (most of the time), and is subject to the magnetic field created by the stator. The rotor rotates as its poles are attracted and repelled by the poles in the stator. Watch our video below showing how it works. This video covers a brushless DC motor where the rotor is on the outside, in other motors the same principle is in reverse, with the electromagnets on the outside. Video (1 minute):
Strength of a motor:
The strength of the motor (torque) is determined by voltage and
the length of the wire in an electromagnet in the stator,
the longer the wire (which means more coils in the stator) the stronger the magnetic field. This means more power to
turn the rotor. See our video which applies to both generators and motors
to learn more.
Armature - the rotating part of the motor - this used to be called a rotor, it supports the rotating copper coils. In the photo below you do not see the coils because they are tightly tucked into the armature. A smooth housing protects the coils from damage.
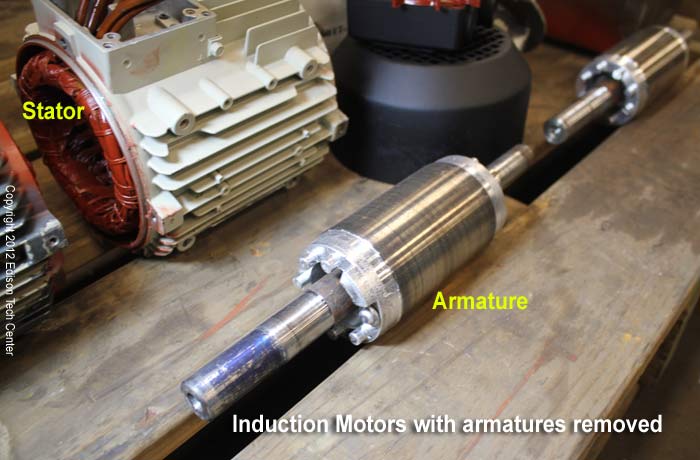

Above: four distinct coils are clearly seen in this stator (the armature was removed)
Winding or "Coil"- copper wires wound around a core to used to create or receive electromagnetic energy.
Wire used in the windings MUST be insulated. In some photos you will see what looks like bare copper wire windings, it is not, it is simply a enameled with a clear coating.
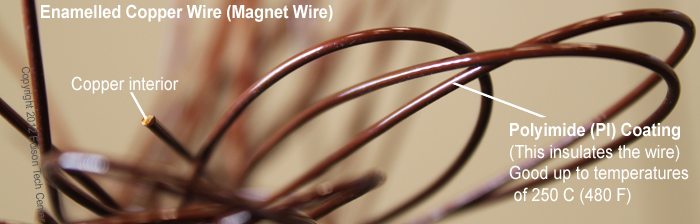
Copper is the most common material for windings. Aluminum is also used but must be thicker to carry the same electrical load safely. Copper windings allow for a smaller sized motor. More on Copper >
Burning out a motor, troubleshooting:
If a motor is run for too long or at excessive
load, it may "burn up". This means that that the high temperature caused
the winding insulation to break down or melt, the windings then short
when they touch and the motor is damaged. You can also burn up a motor by putting more voltage into it than the
winding wires are rated for. In that case the wire will melt at the weakest point, severing the connection. You can
test a motor to see if it has burned out this way by testing for Ohms (resistance) on a multi-meter.
In general you want to look for black marks in the windings when you check a motor.
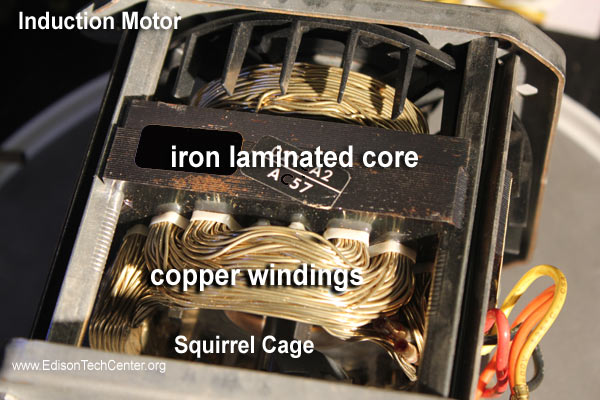
Squirrel Cage - the second coil in an induction motor, see below
to see how it works
Induction - the generation of electromotive force in a closed
circuit by a varying magnetic flux through the circuit. In AC power
the power level is going up and down, this charges the winding for a
moment creating a magnetic field. When the power drops in the cycle
the magnetic field cannot be sustained and it collapses. This action
transfers power through magnetics into the other winding or coil. LEARN
MORE about induction here.
3.) Types of AC Electric Motors
|
3.a) Induction
Motor
3.b) Universal Motor (can use DC or AC)
3.c) Synchronous Motors
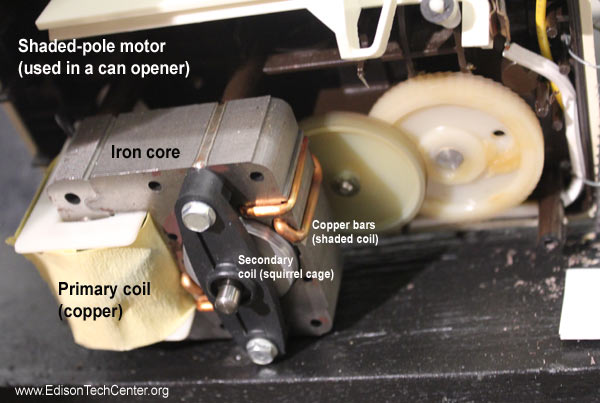
3.d) Shaded-Pole Motors
|

See our page dedicated to the Induction Motor here >
|
|

This is a powerful motor which can be used with both AC and DC power.
Advantages:
-High starting torque, and small size (good for there common use in
consumer power tools)
-Can run at high speeds (great for washing machines and electric drills)
Disadvantages:
-Brushes will wear out over time
Uses: appliances, hand held power tools
See the video below:
|
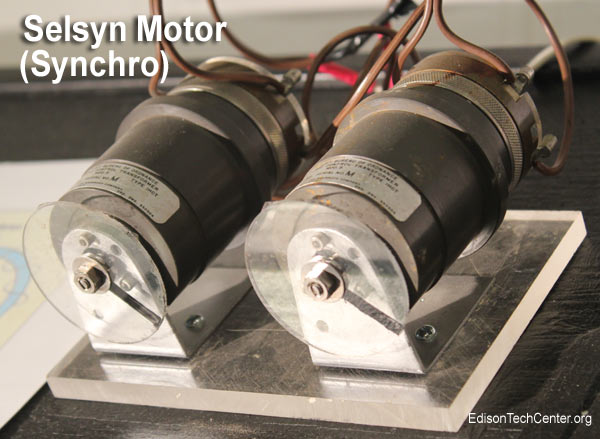
This motor is similar to in induction motor except that it moves with line frequency.
The Selsyn Motor was developed in 1925 and is now known as the Synchro. Learn more about them here.
Advantages: It provides a steady speed which is determined by
the number of poles and the supplied AC power frequency.
Disadvantages: Cannot handle varying torque, this motor will
stop or "pull out" at a given torque.
Uses: a clock
uses synchronous motors to provide an accurate rotation speed for the
hands. This is an analogue motor and while speed is accurate,
the stepper motor would be better for working with computers since it
functions on rigid "steps" of a turn.
|
 |
|
Advantages: reaches a strong torque level once the rotor has
begun spinning fast.
Used in fans, appliances
Disadvantages: slow to start, low torque to start. Used in fans,
notice the slow start of fans.
This motor is also used in washing machine drains, can openers, and
other household appliances.
Other kinds of motors work better for more powerful needs above 125
watts.
See the video below:
|
|
4.) Direct Current (DC) Motors:
Direct current motors were the first kind of electric motor. They are typically 75-80% efficient. They work well at variable speeds and have great torque.
4.a) General Info
4.b) Brushed DC Motors
4.b.1) DC Shunt-wound Motor
4.b.2) DC Series-wound Motor
4.b.3) Pancake Motors
4.b.4) Permanent Magnet DC Motor
4.b.5) Separately Excited (Sepex)
4.c) Brushless DC Motors
4.c.1) Stepper Motor
4.c.2) Coreless / Ironless DC Motors
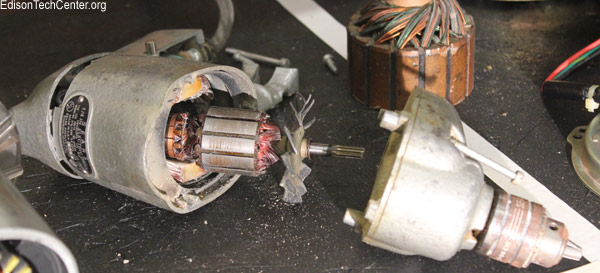
Brushed
DC motors:
The first DC motors used brushes to transfer current to the other side of the motor. The brush is named so because it first resembled a broom-like shape. The little metal fibers rubbed against a rotating part of the motor to keep constant contact. The problem with brushes is that they wear out over time due to the mechanics. The brushes would create sparks due to friction. The parks often melted insulation and caused shorts in the armature and even melted the commutator.
The first motors were used on street railways.
Uses a split
ring commutator with brushes.
Advantages:
-Used in a myriad of applications, has easy speed control using level
of voltage to control.
-Has a high starting torque (a powerful start)
Limitations: brushes create friction and sparks, this can overheat the
device and melt/burn the brushes, therefore the maximum rotation speed
is limited. The sparks also cause radio freq. interference. (RFI)
There are
five types of DC motors with brushes:
DC Shunt Wound Motor
DC Series Wound Motor
DC compound motor - Cumulative compound and Differentially Compounded
Permanent Magnet DC motor
Separately Excited
Pancake Motor
Brushless DC motors:
The brush is
replaced by an external electric switch which is synchronized to the
position of the motor (it will reverse polarity as needed to keep the
motor shaft spinning in one direction)
-More efficient than brush motors
-Used when speed control must be precise (such as in disk drives, tape
machines, electric cars etc.)
-Long life since runs at a cooler temperature and there are no brushes
to wear out.
Types of
brushless DC motors:
Stepper Motor
Coreless / Ironless DC Motors
4.b) BRUSHED DC MOTORS:
4.b.1) DC Shunt-wound Motor
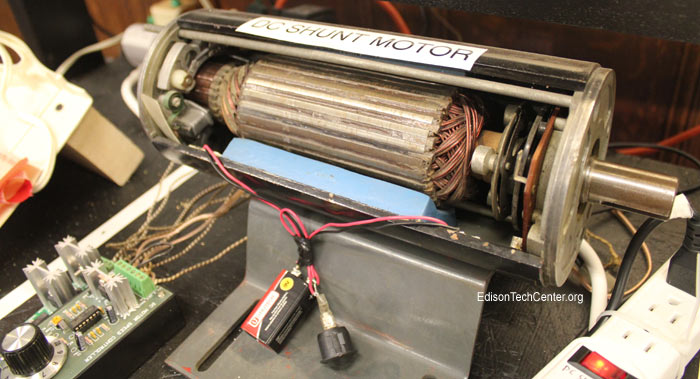
The DC shunt motor is wired so that the field coil is connected in parallel with the armature. Both windings get the same voltage. The shunt field coil is wound with many turns of fine wire to create a high resistance. This ensures that the field coil will draw less current than the armature (rotor).
The armature (seen above, it is the long fat cylindrical rotating part) has thick copper wires, this is so that lots of current can pass through it to get the motor started.
As the armature turns (see photo below) the current is limited by counterelectromotive force.
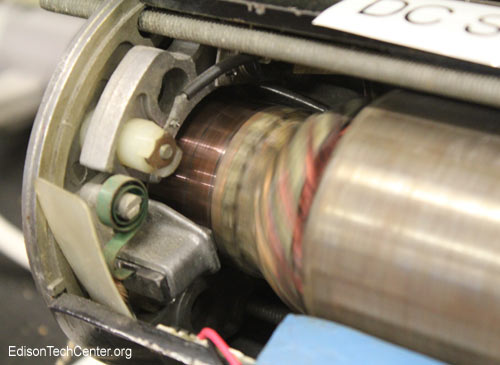
The strength of the shunt field coil determines the speed and torque of the motor.
Advantages: The DC Shunt Motor regulates its own speed. This means that if load is added the armature slows, CEMF decreases, which results in the armature current increasing. This results in an increase in torque which helps move the heavy load. When the load is removed the armature speeds up, the CEMF increases which limits the current and torque decreases.
The conveyor belt example: Imagine a conveyor belt moving at a given speed, then a heavy box enters the belt. This type of motor will keep the belt moving at a constant speed no matter how many boxes are moving on the belt.
See the video below of a DC shunt motor in action!:
4.b.2) DC series-wound motor
The Series wound motor is a self-excited type dc motor. The field winding is connected
internally in series to the rotor's winding. The field winding in the stator is thus exposed
to the full current generated by the rotor's winding.
This kind of motor looks similar to a DC shunt-wound motor except that
the field windings are made of a heavier wire so it can stand the higher currents.
Uses: This type of motor is used in industry as a starting motor due to great torque.
Learn more about the series-wound motor:
Article 1
Article 2
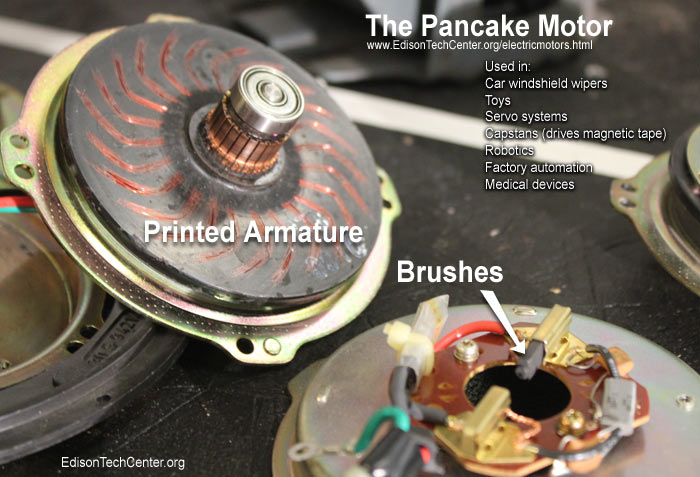
4.b.3) Pancake DC Motor (aka Printed Armature Motor)

The pancake motor is a ironless motor. Most motors have a copper winding around an iron core.
Video showing pancake motor examples:
Advantages:
Exact speed control, flat profile, does not have cogging which is caused
by iron in an electromagnet
Disadvantages:
flat shape is not good for all applications
Has a winding shaped in a flat epoxy disc between two high-flux magnets. It is totally ironless, making great efficiency. Used in servo applications, was first designed as a windshield wiper motors and the video industry since it was very flat in profile and had good speed control. Computers and video/audio recording all used magnetic tape, precise and fast speed control was needed so the pancake motor was developed for this. Today it is used in a myriad of other applications including robotics and servo systems.
4.b.4) DC compound motor (Cumulative and Differentially Compounded)
This is another self excited motor with both series and shunt field coils.
It has an efficient speed regulation and decent starting torque.
Learn more about this type of motor here.
4.b.5) Permanent magnet DC motor
This kind of motor operates well at high speed and can be very compact.
Uses: compressors, other industrial applications
Learn more about this type of motor here.
4.b.6) Separately excited (sepex)
The SepEx has a field winding which is separately powered from the armature with a direct
current signal. The field magnet also has its own DC supply. As a result you'll see this
type of motor has four wires - 2 for the field and 2 for the armature.
This motor is a brushed dc motor
which has broader torque curves than a series wound DC motor.
Learn more about this type of motor here.
4.c) Brushless DC Motors:
4.c.1 ) Stepper Motor
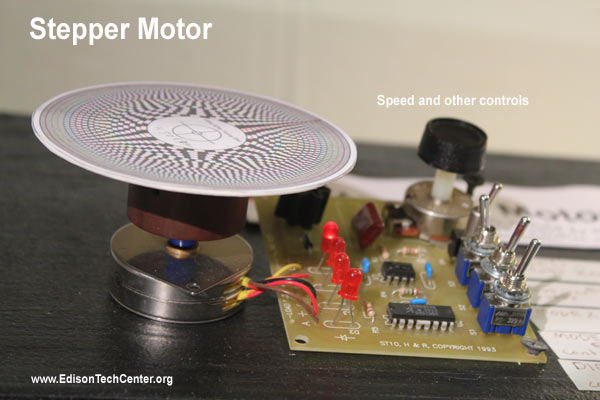
The stepper motor is a type of brushless motor that moves the central shaft one part of a turn at a time. This is done using toothed electromagnets around a centralized gear shaped piece of iron. There are many kinds of stepper motors. They are used in systems that move objects to a precise position, like a scanner, disc drive, and industrial laser carving devices.
See the video of the Stepper Motor in action below:
4.c.2) Coreless / Ironless DC Motors
The wound copper
or aluminum core rotates around a magnet without the use of iron. This
is done by making a cylinder shape.
Advantage: light and fast to start spinning (used in computer
hard drives)
Disadvantage: easily overheats since iron normally acts as a
heat sink, it needs a fan to keep cool.
Learn more about this type of motor here.
Sources:
The Joseph Henry Papers - Smithsonian
Denver Electric Motor Company
Steve Normandin
Wikipedia
Thomas Davenport - Dr. Frank Wicks Jr.
DIY Electric Car
Related Topics:

Diesel Electric Locomotives |
Trolleys and Light Rail |

Induction Motors |

Electric Cars |
Transformers |

Dynamos and Generators |